

【導讀】陀螺儀是用來測量角速率的器件,在加速度功能基礎上,可以進一步發(fā)展,構建陀螺儀。
陀螺儀是用來測量角速率的器件,在加速度功能基礎上,可以進一步發(fā)展,構建陀螺儀。
陀螺儀的內(nèi)部原理是這樣的:對固定指施加電壓,并交替改變電壓,讓一個質(zhì)量塊做振蕩式來回運動,當旋轉(zhuǎn)時,會產(chǎn)生科里奧利加速度,此時就可以對其進行測量;這有點類似于加速度計,解碼方法大致相同,都會用到放大器。
角速率由科氏加速度測量結果決定
- 科氏加速度 = 2 × (w × 質(zhì)量塊速度)
- w 是施加的角速率(w = 2 πf)
通過 14 kHz 共振結構施加的速度(周期性運動)快速耦合到加速度計框架
- 科氏加速度與諧振器具有相同的頻率和相位,因此可以抵消低速外部振動
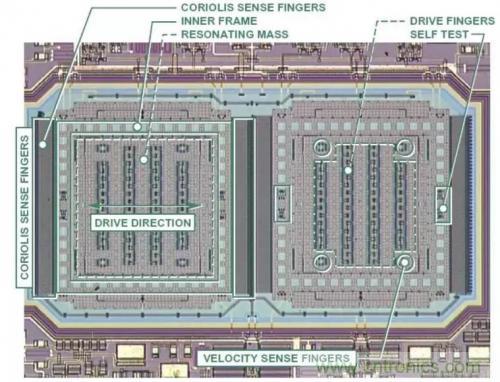
該機械系統(tǒng)的結構與加速度計相似(微加工多晶硅)
信號調(diào)理(電壓轉(zhuǎn)換偏移)采用與加速度計類似的技術
施加變化的電壓來回移動器件,此時器件只有水平運動沒有垂直運動。如果施加旋轉(zhuǎn),可以看到器件會上下移動,外部指將感知該運動,從而就能拾取到與旋轉(zhuǎn)相關的信號。
上面的動畫,只是抽象展示了陀螺儀的工作原理,而真實的陀螺儀內(nèi)部構造是下面這個樣子,別不小心誤會了哦~
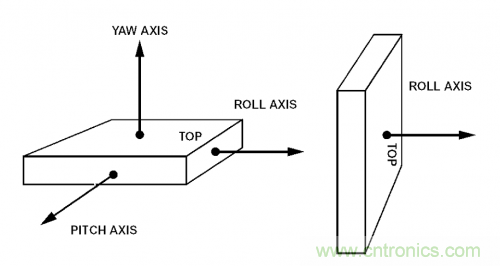
PS:陀螺儀可以三個一起設計,分別對應于所謂滾動、俯仰和偏航。任何了解航空器的人都知道,俯仰是指航空器的上下方向,偏航是指左右方向,滾動是指向左或向右翻滾。要正確控制任何類型的航空器或?qū)棧夹枰肋@三個參數(shù),這就會用到陀螺儀。它們還常常用于汽車導航,當汽車進入隧道而失去 GPS 信號時,這些器件會記錄您的行蹤。
無人機在飛行作業(yè)時,獲取的無人機影像通常會攜帶配套的 POS 數(shù)據(jù)。從而在處理中可以更加方便的處理影像。而 POS 數(shù)據(jù)主要包括 GPS 數(shù)據(jù)和 IMU 數(shù)據(jù),即傾斜攝影測量中的外方位元素:(緯度、經(jīng)度、高程、航向角(Phi)、俯仰角(Omega)及翻滾角(Kappa))。
GPS 數(shù)據(jù)一般用 X、Y、Z 表示,代表了飛機在飛行中曝光點時刻的地理位置。
飛控是由主控 MCU 和慣性測量模塊(IMU,Inertial Measurement Unit)組成。IMU 提供飛行器在空間姿態(tài)的傳感器原始數(shù)據(jù),一般由陀螺儀傳感器 / 加速度傳感器 / 電子羅盤提供飛行器 9DOF 數(shù)據(jù)。
IMU 中的傳感器用來感知飛行器在空中的姿態(tài)和運動狀態(tài),這有個專有名詞叫做運動感測追蹤,英文 Motion Tracking。運動感測技術主要有四種基礎運動傳感器,下面分別說明其進行運動感測追蹤的原理。
微機電系統(tǒng)(MEMS)
IMU 中使用的傳感器基本上都是微機電系統(tǒng)(MEMS),是半導體工業(yè)中非常重要的一個分支。
微機電系統(tǒng)(MEMS, Micro-Electro-Mechanical System)是一種先進的制造技術平臺。微機電系統(tǒng)是微米大小的機械系統(tǒng),是以半導體制造技術為基礎發(fā)展起來的。
我們的四軸飛行器上用到的加速度陀螺儀 MPU6050,電子羅盤 HMC5883L 都是微機電系統(tǒng),屬于傳感 MEMS 分支。傳感 MEMS 技術是指用微電子微機械加工出來的、用敏感元件如電容、壓電、壓阻、熱電耦、諧振、隧道電流等來感受轉(zhuǎn)換電信號的器件和系統(tǒng)。
加速器(G-sensors)
加速器可用來感測線性加速度與傾斜角度,單一或多軸加速器可感應結合線性與重力加速度的幅度與方向。含加速器的產(chǎn)品,可提供有限的運動感測功能。
加速度計的低頻特性好,可以測量低速的靜態(tài)加速度。在我們的飛行器上,就是對重力加速度 g(也就是前面說的靜態(tài)加速度)的測量和分析,其它瞬間加速度可以忽略。記住這一點對姿態(tài)解算融合理解非常重要。
當我們把加速度計拿在手上隨意轉(zhuǎn)動時,我們看的是重力加速度在三個軸上的分量值。加速度計在自由落體時,其輸出為 0。為什么會這樣呢?這里涉及到加速度計的設計原理:加速度計測量加速度是通過比力來測量,而不是通過加速度。
陀螺儀(Gyros)
陀螺儀是利用高速回轉(zhuǎn)體的動量矩敏感殼體相對慣性空間繞正交于自轉(zhuǎn)軸的一個或二個軸的角運動檢測裝置。利用其他原理制成的角運動檢測裝置起同樣功能的也稱陀螺儀。
陀螺儀可感測一軸或多軸的旋轉(zhuǎn)角速度,可精準感測自由空間中的復雜移動動作,因此,陀螺儀成為追蹤物體移動方位與旋轉(zhuǎn)動作的必要運動傳感器。不像加速器與電子羅盤,陀螺儀不須借助任何如重力或磁場等的外在力量,能夠自主性的發(fā)揮其功能。所以,從理論上講只用陀螺儀是可以完成姿態(tài)導航的任務的。
陀螺儀的特性就是高頻特性好,可以測量高速的旋轉(zhuǎn)運動。缺點是存在零點漂移,容易受溫度 / 加速度等的影響。
電子羅盤(E-Compasses)
電子羅盤也叫數(shù)字指南針,磁力計,是利用地磁場來定北極的一種方法?,F(xiàn)在一般有用磁阻傳感器和磁通門加工而成的電子羅盤。
電子羅盤可由地球的磁場來感測方向。運用電子羅盤的消費性電子產(chǎn)品應用,包含在手機的地圖應用程序顯示正確方向,或為導航應用程序提供前進方向數(shù)據(jù)。然而,電子設備或建筑材料的磁場干擾,比地球磁場來得強,導致電子羅盤傳感器的輸出值,較容易受到各種環(huán)境因素的影響,尤其在室內(nèi)更是如此,因此,電子羅盤須要透過頻繁的校正,才能維持前進方向數(shù)據(jù)的準確度。
壓力傳感器(Barometers)
壓力傳感器又叫做氣壓計,會藉由氣壓的變化來感測物體的相對與絕對高度,常被運用于與運動、健身、方位推測等應用有關的消費性產(chǎn)品中,例如,可感測使用者的移動層樓,調(diào)整地圖信息。
IMU 數(shù)據(jù)主要包含了:航向角(Phi)、俯仰角(Omega)及翻滾角(Kappa)三個數(shù)據(jù)。
1、航向角(Phi)
航向角英文縮寫是:Phi。定義為:飛機和航天飛機的縱軸與地球北極之間的夾角。
示意圖如下圖所示:

2、俯仰角(Omega)
俯仰角英文縮寫是:Omega。定義為:平行于機身軸線并指向飛行器前方的向量與地面的夾角。
示意圖如下:

3、翻滾角(Kappa)
翻滾角又叫側(cè)滾角,英文縮寫是 Kappa。定義為:光軸與十周之間的夾角。
示意圖如下圖所示:

免責聲明:本文為轉(zhuǎn)載文章,轉(zhuǎn)載此文目的在于傳遞更多信息,版權歸原作者所有。本文所用視頻、圖片、文字如涉及作品版權問題,請聯(lián)系小編進行處理。



