

【導(dǎo)讀】假設(shè)你已經(jīng)通過(guò)迭代信息傳遞相位邊限和回路帶寬在鎖相環(huán)(PLL)上花費(fèi)了一些時(shí)間。但遺憾地是,還是無(wú)法在相位噪聲、雜散和鎖定時(shí)間之間達(dá)成良好的平衡。感到泄氣?想要放棄?等一下!你是否試過(guò)伽馬優(yōu)化參數(shù)?
伽馬優(yōu)化參數(shù)
伽馬是一個(gè)數(shù)值大于零的變量。當(dāng)伽馬等于1時(shí),相位邊限在回路頻處會(huì)達(dá)到最大值(圖1)。很多回路濾波器設(shè)計(jì)方法把伽馬值設(shè)為1,這是個(gè)很好的起點(diǎn),但還有進(jìn)一步優(yōu)化的空間。
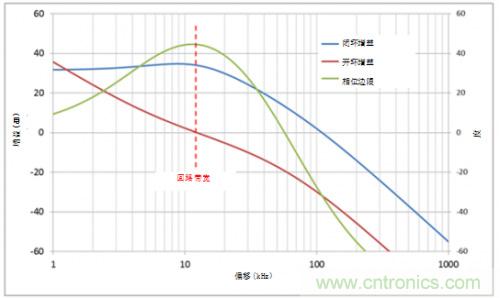
圖1:伽馬等于1時(shí)的波德圖
伽馬能夠有效用于優(yōu)化帶內(nèi)相位噪聲,尤其是因壓控振蕩器 (VCO) 帶來(lái)的提升斜率。此外,如果因?yàn)殍b相器頻率限制和電荷泵電流,您無(wú)法獲得更高的回路帶寬,伽馬能夠幫助您打破最大可實(shí)現(xiàn)回路帶寬的限制。不過(guò),如果您將伽馬值設(shè)置的很大,則會(huì)明顯延長(zhǎng)鎖定時(shí)間。
圖2所示為伽馬對(duì)相位噪聲的影響?;芈穾捄拖辔贿呄尴嗤?,而伽馬值不同。伽馬值越高,由于噪聲整形回路濾波器平緩度提升,VCO的提升斜率也會(huì)變低。
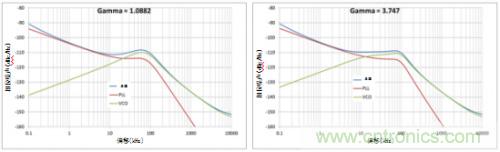
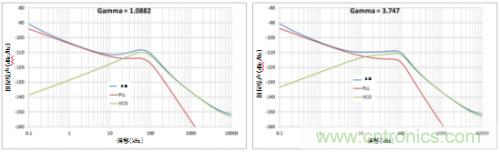
圖2:相位噪聲 vs 伽馬值為1.0882時(shí)(a);相位噪聲 vs 伽馬值為3.747時(shí)(b)
圖3所示為二階回路濾波器下可實(shí)現(xiàn)的最大回路帶寬 vs 不同的伽馬值。鑒相器頻率及電荷泵電流保持不變。
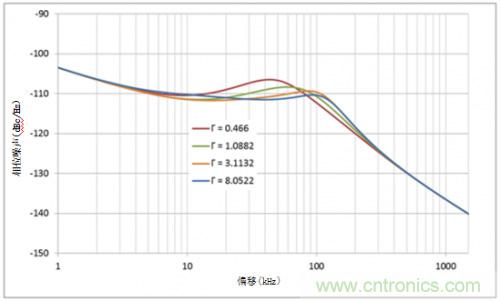
圖3:回路帶寬 vs 伽馬值
如果設(shè)計(jì)目標(biāo)為100kHz回路帶寬,45度相位邊限,當(dāng)伽馬值限制為1時(shí),您最多只能得到79kHz的回路帶寬。然而,如果您能接受更高的伽馬值,如伽馬值等于8,則可以實(shí)現(xiàn)設(shè)計(jì)目標(biāo)。此時(shí),回路帶寬為96.6kHz,相位邊限為43.4度。
但較高的伽馬值也有其蔽處:鎖定時(shí)間更長(zhǎng)。圖4所示為不同伽馬值下200MHz頻率躍變的鎖定時(shí)間;回路帶寬和相位邊限保持不變。當(dāng)伽馬值和回路帶寬分別為1和3.7,穩(wěn)定容差在±100Hz范圍內(nèi),模擬鎖定時(shí)間值分別為46.5µs與118µs。
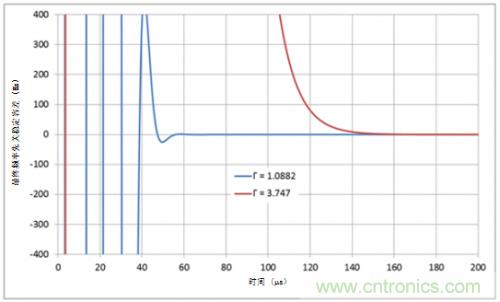
圖4:鎖定時(shí)間 vs 伽馬值
使用案例
只要伽馬值優(yōu)化參數(shù)不限于1,您就能更自由的去開(kāi)發(fā)您的PLL環(huán)。例如,如果目標(biāo)是實(shí)現(xiàn)最小時(shí)基誤差,通常,您需要將回路帶寬與相位邊限設(shè)置為更高的數(shù)值。如果伽馬值等于1,由于相位邊限響應(yīng)的峰值與回路帶寬一致,您可能無(wú)法得到期望的高回路帶寬值。這種情況下,您可以通過(guò)設(shè)置大于1的伽馬值,犧牲鎖定時(shí)間。這樣,您就可以得到更高的回路帶寬值。



