

【導(dǎo)讀】這里小編為大家分享一位牛人手把手教你設(shè)計(jì)出一個(gè)輪式小車慣性導(dǎo)航系統(tǒng),該系統(tǒng)能夠通過wifi實(shí)現(xiàn)PC終端和手持終端控制輪式小車行動(dòng)以及小車所采集數(shù)據(jù)的傳輸。有興趣的童鞋一定要來看哦!
本文的目標(biāo)是研制一個(gè)輪式小車慣性導(dǎo)航系統(tǒng),能夠通過wifi實(shí)現(xiàn)PC終端和手持終端控制輪式小車行動(dòng)以及小車所采集數(shù)據(jù)的傳輸。搭建如下圖1所示的系統(tǒng),TI公司的浮點(diǎn)DSP TMS320F28335芯片作為主數(shù)字信號(hào)處理器,采集各MEMS慣性傳感器的信號(hào)并處理,處理結(jié)果通過WIFI將數(shù)據(jù)輸送到PC終端;PC終端負(fù)責(zé)顯示定位結(jié)果和地圖顯示,并向小車驅(qū)動(dòng)系統(tǒng)發(fā)送控制命令,同時(shí)接收驅(qū)動(dòng)系統(tǒng)反饋的里程計(jì)信息。
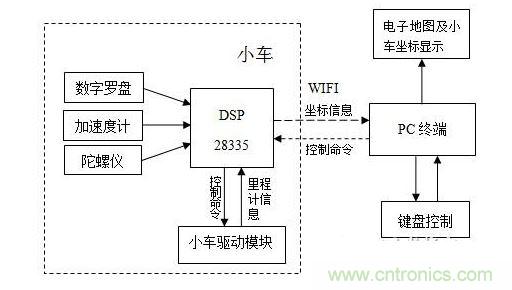
圖1 總體架構(gòu)
硬件設(shè)計(jì)上,主要分為核心板和驅(qū)動(dòng)板。核心板包括DSP最小系統(tǒng),JTAG下載口設(shè)計(jì),系統(tǒng)電源供給電路和MEMS傳感器,WIFI模塊等。而驅(qū)動(dòng)板主要設(shè)計(jì)的內(nèi)容是直流大電機(jī)的驅(qū)動(dòng)模塊。
電源電路設(shè)計(jì)
TMS320F28335工作時(shí)需要的電壓不同:內(nèi)核電壓(1.9 V)與I/O供電電壓(3.3 V),對(duì)于電源比較敏感,所以電源部分利用兩路輸出電源器件TPS767D318來實(shí)現(xiàn),如圖2所示。同時(shí)根據(jù)仿真實(shí)驗(yàn)和實(shí)際焊接電路的測試,電源模塊輸出端最好使用一些容值不小于10uf的保護(hù)電容,且不能使用貼片電容,否則工作不穩(wěn)定。
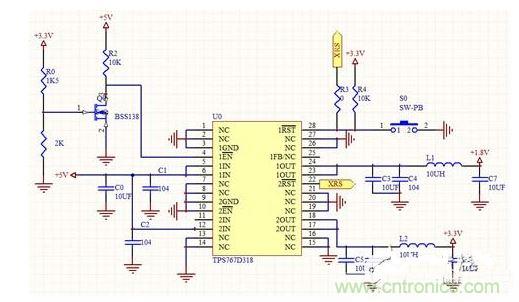
圖2 DSP電源設(shè)計(jì)
在電源設(shè)計(jì)中,考慮到TPS767D318芯片可以產(chǎn)生復(fù)位信號(hào),所以在核心板上并沒有再另外為DSP設(shè)計(jì)復(fù)位電路。
JTAG下載口電路設(shè)計(jì)
圖3為JTAG電路,按照仿真器的通信引腳選擇14腳的仿真接口,同時(shí)要注意EMU0和EMUl信號(hào)必須通過上拉電阻連接至電源,其中上拉電阻為10kΩ。
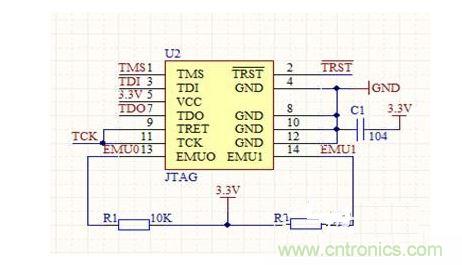
圖3 JTAG電路設(shè)計(jì)
[page]
小車驅(qū)動(dòng)板設(shè)計(jì)
在本裝置中,我們采用BTS7960作為直流電機(jī)驅(qū)動(dòng)芯片。BTS7960是集成的大電流半橋驅(qū)動(dòng),其內(nèi)部包含了一片NMOS、一片PMOS和一片半橋門集驅(qū)動(dòng),在IOUT = 9 A,VS= 13.5V,Tj = 25 °C 時(shí),其內(nèi)阻抗為17mΩ。裝置采用了兩個(gè)直流大電機(jī),如圖4所示為驅(qū)動(dòng)單個(gè)電機(jī)前后轉(zhuǎn)向的電路圖。
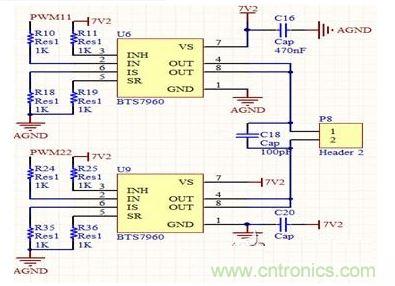
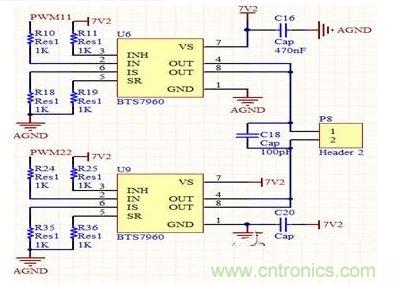
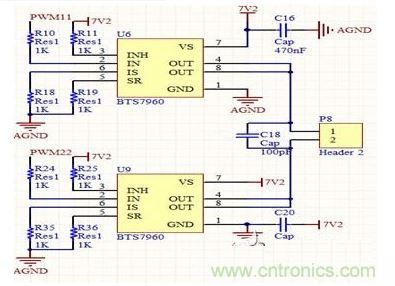
圖4 驅(qū)動(dòng)模塊電路設(shè)計(jì)
在電機(jī)驅(qū)動(dòng)這里,需要注意一個(gè)細(xì)節(jié),就是電機(jī)在轉(zhuǎn)動(dòng)過程中有可能會(huì)產(chǎn)生反向的電動(dòng)勢,使電流一瞬間過大,導(dǎo)致單片機(jī)復(fù)位甚至有可能燒壞芯片。因此在設(shè)計(jì)過程中,可以考慮在單片機(jī)PWM輸入到電機(jī)驅(qū)動(dòng)接口的地方添加光耦器件隔離或者二極管。如圖5所示,驅(qū)動(dòng)板選擇了tlp521-4這種光耦器件設(shè)計(jì)隔離電路,減小電壓的干擾,減化電路的設(shè)計(jì),同時(shí)也把四路PWM的I/O電平從3.3上拉到5V。
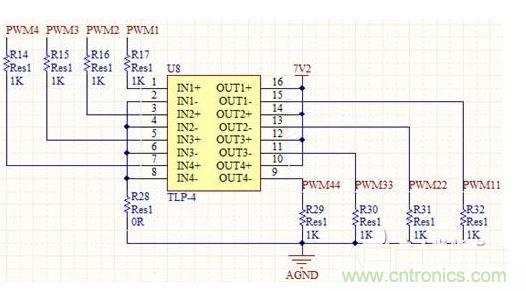
圖5 TLP521隔離電路
本文所設(shè)計(jì)的輪式小車室內(nèi)慣性導(dǎo)航裝置,分析了該軟件設(shè)計(jì)的各個(gè)模塊的具體實(shí)現(xiàn)方法。經(jīng)實(shí)驗(yàn)結(jié)果表明,該設(shè)計(jì)能夠?qū)崟r(shí)監(jiān)測到移動(dòng)機(jī)器人的位置信息,并對(duì)其能實(shí)現(xiàn)有效控制。同時(shí)其低成本、高精度、易操作的特點(diǎn)將進(jìn)一步應(yīng)用于例如巡邏機(jī)器人、救援機(jī)器人等專業(yè)領(lǐng)域,必將吸引國內(nèi)外眾多的投資商對(duì)其投資并進(jìn)行更進(jìn)一步的研發(fā)與應(yīng)用,使其有著十分廣大的創(chuàng)新創(chuàng)業(yè)前景、應(yīng)用前景和市場前景。



