

【導(dǎo)讀】DC-DC轉(zhuǎn)換器斜率補(bǔ)償這一概念很難完全掌握,文章以降壓轉(zhuǎn)換器為例進(jìn)行闡述,解釋為什么會(huì)發(fā)生亞諧波振蕩,說(shuō)明斜率補(bǔ)償如何影響輸入和輸出端口電壓變化的穩(wěn)定性。這對(duì)不太熟悉峰值電流控制的工程師非常有用。
多年來(lái),我遇到過(guò)許多沒(méi)機(jī)會(huì)充分掌握DC-DC轉(zhuǎn)換器斜率補(bǔ)償概念的工程師。我將以降壓轉(zhuǎn)換器為例,嘗試澄清這個(gè)概念。圖1說(shuō)明了降壓轉(zhuǎn)換原理。開(kāi)關(guān)以頻率fS在源VI和地之間切換。相應(yīng)周期為TS= 1/fS,開(kāi)關(guān)處于“向上”位置的TS部分表示為DTS,其中D是占空比(0 < D < 1)。對(duì)fS= 100kHz和D = 0.25的電路進(jìn)行PSpice仿真得到圖2的波形。將電路看作低通濾波器,我們注意到,在初始瞬態(tài)之后,電路達(dá)到一種穩(wěn)定狀態(tài),VO穩(wěn)定在3V左右,雖然有少量紋波。如果將D提高到0.5,VO將穩(wěn)定在6V左右;如果將D提升到0.75,VO將穩(wěn)定在約9V。

圖1:(a)降壓轉(zhuǎn)換原理(fS和D表示開(kāi)關(guān)切換的頻率和占空比);(b)VO是D的函數(shù)。
事實(shí)上很容易看出,VO穩(wěn)定在方波(圖1中vsw)的平均值附近,其中:

由于0 < D < 1,很明顯電路可以作為一種分壓器,不管負(fù)載RL所需的電流如何,公式(1)都保持不變。最初,電感電流的一大部分對(duì)C進(jìn)行充電,電路一旦達(dá)到穩(wěn)定狀態(tài),電容電流將平均為零,因此電感提供的平均電流IL等于負(fù)載要求的平均電流IO。在上面的例子中,IL= IO= VO/RL= 3A。

圖2:在fS = 100kHz和D = 0.25的條件下,圖1電路的PSpice波形。
降壓轉(zhuǎn)換器最流行的應(yīng)用是VO的穩(wěn)壓調(diào)節(jié)。為了進(jìn)行調(diào)節(jié),圖1的電路必須包含一個(gè)控制器來(lái)感測(cè)VO,并不斷調(diào)整D,使VO保持在規(guī)定值,而不管VI會(huì)如何變化。不用說(shuō),控制器是個(gè)負(fù)反饋系統(tǒng)。圖1中的R、L、C值被精心選擇用于臨界阻尼瞬態(tài),但所使用的RLC電路并不一定是臨界阻尼,因此控制器應(yīng)能提供足夠的相位裕度以確保足夠的動(dòng)態(tài)調(diào)節(jié)范圍。
控制器如何調(diào)整D?控制器有兩類:電壓模式和電流模式控制器。下面將討論電流模式控制器下面的一個(gè)常見(jiàn)類型——峰值電流模式控制(PCMC),圖3是它的一個(gè)示例。為感測(cè)電感電流iL,電路使用一個(gè)小串聯(lián)電阻Rsense,其壓降由具有ai增益的放大器放大。該放大器將iL轉(zhuǎn)換成電壓RiiL,其中:
Ri(單位為V/A或歐姆)是電流-電壓轉(zhuǎn)換的整體增益。為感測(cè)輸出電壓VO,該電路使用分壓器R1-R2產(chǎn)生電壓ßVO,其中:

圖3:不帶斜率補(bǔ)償?shù)腜CMC降壓轉(zhuǎn)換器的電路原理圖。
該系統(tǒng)的核心是誤差放大器EA(高增益放大器),它將ßVO與參考電壓VREF進(jìn)行比較,并輸出使其差值接近零所需的任何電壓vEA,從而給出:
一旦VO達(dá)到穩(wěn)定狀態(tài),電路工作如下:
當(dāng)一個(gè)時(shí)鐘脈沖置位觸發(fā)器時(shí),開(kāi)始一個(gè)周期。這將關(guān)閉Mp開(kāi)關(guān),使vSW=VI。在該周期的這一部分(在圖4中表示為DTS),電感器電流iL以斜率Sn上升,由iL-vL電感法則掌控,或Sn=diL/dt=vL/L。在這段時(shí)間,我們得到vL=VI– VO,所以:

圖4:峰值電流模式控制(PCMC)中的穩(wěn)態(tài)波形。
回到圖3,我們觀察到CMP比較器連續(xù)地將電壓RiiL與電壓vEA進(jìn)行比較,一旦RiiL達(dá)到vEA,CMP會(huì)復(fù)位觸發(fā)器。兩邊除以Ri,相當(dāng)于說(shuō),一旦iL達(dá)到這個(gè)值,CMP就動(dòng)作:
這樣,我們僅以電流形式就可以顯示一個(gè)周期,如圖4所示?,F(xiàn)在,復(fù)位觸發(fā)器打開(kāi)Mp開(kāi)關(guān),同時(shí)關(guān)閉Mn開(kāi)關(guān),使vSW= 0。在表示為(1–D)TS的周期其余部分,我們有vL=0–VO,所以iL以Sf的斜率下降,因此有:
新的周期在下一個(gè)時(shí)鐘脈沖到來(lái)時(shí)開(kāi)始。
未補(bǔ)償?shù)腜CMC的兩個(gè)缺陷
圖3所示電路存在兩個(gè)缺陷。第一個(gè)缺陷如圖5所示,是將VO調(diào)節(jié)為3.0V的轉(zhuǎn)換器設(shè)計(jì)(為簡(jiǎn)單起見(jiàn),假設(shè)周期在t = 0時(shí)開(kāi)始)。圖4a示出了在VI=9V條件下,穩(wěn)態(tài)電感器電流iL和其平均值IL,對(duì)應(yīng)于D = 3/9 = 1/3的占空比。假設(shè)現(xiàn)在VI下降到4.5V,則對(duì)應(yīng)D = 3 / 4.5 = 2/3的占空比。假設(shè)vEA沒(méi)時(shí)間發(fā)生顯著變化,那么平均電感器電流iL將增加,如圖5b所示。這是因?yàn)楫?dāng)下坡Sf在-3/L保持恒定時(shí),上坡Sn從(9-3)/L減小到(4.5-3)/L,即從6/L減少到1.5/L。
隨著iL增加,VO也隨之增加,表明穩(wěn)壓不夠。
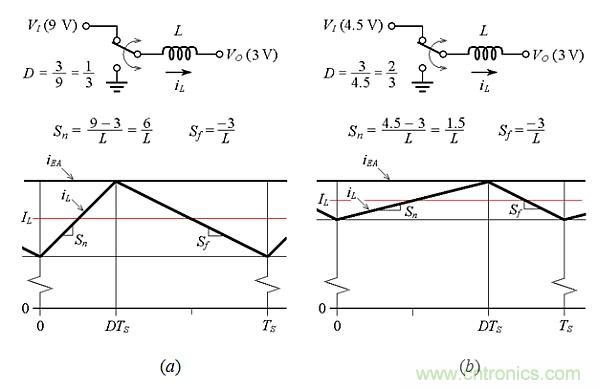
圖5:圖3電路中兩種不同占空比的電感電流。
第二個(gè)缺陷是稱為次諧波振蕩的不穩(wěn)定形式,當(dāng)D>0.5時(shí)會(huì)產(chǎn)生這種不穩(wěn)定。圖6顯示了周期開(kāi)始時(shí)電感電流擾動(dòng)il(0)如何在周期結(jié)束時(shí)演化為擾動(dòng)il(TS)。例如,擾動(dòng)可能由前一周期中比較器失能引起。借助簡(jiǎn)單的幾何,我們可以得出il(0)/△t = Sn和il(TS)/△t = Sf。消除△t,得出:
公式表明:
(a)il(TS)的極性與il(0)的極性相反; (b)對(duì)于D < 0.5,在足夠的周期數(shù)之后,其幅值將減小直至消失;但對(duì)于D>0.5,將趨于從一個(gè)周期增加到下一個(gè)周期,導(dǎo)致前述的亞諧波不穩(wěn)定。

圖6:D>0.5時(shí)的次諧波振蕩。
斜率補(bǔ)償
回來(lái)看圖5,我們觀察到,如果希望圖5b保持與圖5a相同的iL值,需要減小圖5b的iEA值,以便“下壓”iL波形,直到各IL對(duì)齊。那么, iEA需要減到多少呢?為了回答這個(gè)問(wèn)題,需要畫出三個(gè)不同D值所需的iL波形。如圖7所示,我們從頂部繪制iL的下降斜坡開(kāi)始,以相同的IL為垂直中心,并且全具有相同的斜率Sf=-VO/L。接下來(lái),通過(guò)繪制上行斜坡來(lái)完成iL波形,如圖7底部所示。最后,將這三張圖疊加,如圖8所示,并觀察到峰值軌跡斜坡的斜率為Sf/2 = –VO/2L。

圖7:構(gòu)建D = 0.25、0.5和0.75的補(bǔ)償iL波形。
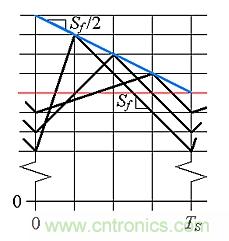
圖8:圖7中峰值的軌跡是斜率為Sf/2的斜坡。
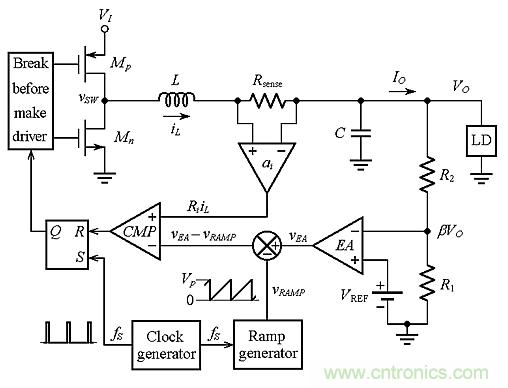
圖9:在圖3的PCMC降壓轉(zhuǎn)換器中引入斜率補(bǔ)償。
圖9給出了修改圖3的電路以實(shí)現(xiàn)斜率補(bǔ)償?shù)囊环N方法。該電路現(xiàn)在包含一個(gè)以fS頻率工作的鋸齒波發(fā)生器,從vEA中減去其輸出vRAMP,產(chǎn)生iL所期望的峰值軌跡。使用斜率補(bǔ)償,圖5的波形如圖10所示變化,其中iEA(comp) = (vEA– vRAMP)/Ri。
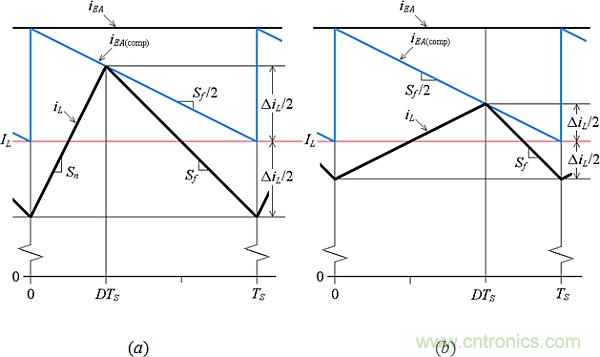
圖10:圖9電路在兩種不同占空比時(shí)的電感電流。
斜率補(bǔ)償還消除了次諧波振蕩,如圖11所示,這是額外的好處。使用圖形檢查,我們觀察到周期開(kāi)始的擾動(dòng)il(0)將導(dǎo)致更小幅值的周期結(jié)束擾動(dòng)iL(TS),盡管D > 0.5(事實(shí)上,你可以認(rèn)為,這適用于0 < D < 1的任何D值)。用一個(gè)形象的比喻,通過(guò)斜率補(bǔ)償,我們實(shí)際上是用一塊斜坡補(bǔ)償之石殺死了兩只搗蛋鳥(穩(wěn)壓不夠和次諧波振蕩)。圖9中以三角形表示的運(yùn)算放大器EA有兩個(gè)重要功能:
(a)驅(qū)動(dòng)其反相輸入電壓盡可能接近非反相輸入電壓,以便近似等式(4); (b)提供可確保整個(gè)系統(tǒng)規(guī)定相位余量的頻率分布。
這并非一款普通放大器,以它為題足夠?qū)懸黄P(guān)于穩(wěn)定性分析和誤差放大器設(shè)計(jì)的博文了。
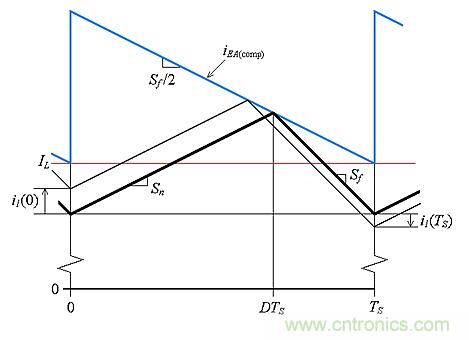
圖11:斜率補(bǔ)償可防止次諧波振蕩(無(wú)論D值大?。?。



