

【導(dǎo)讀】液體或氣體流速檢測(cè)是物聯(lián)網(wǎng) (IoT) 應(yīng)用的一項(xiàng)重要要求,如監(jiān)控氣流或液體處理性能所需的智能表計(jì)和傳感器。 傳感器通常需要部署在遠(yuǎn)離電源的位置,那么在其使用壽命期間必須依靠電池供電。 因此低能耗就十分關(guān)鍵。
在流量監(jiān)控應(yīng)用中,通常選擇的測(cè)量技術(shù)是電感檢測(cè)。 這項(xiàng)技術(shù)結(jié)合了旋轉(zhuǎn)金屬槳輪和線圈傳感器,其中傳感器在槳片經(jīng)過線圈附近時(shí)利用電壓和電流變化來檢測(cè)槳片。 當(dāng)交流電流作用于線圈時(shí),所產(chǎn)生的交流磁場(chǎng)會(huì)使導(dǎo)電目標(biāo)中形成渦電流。
基于電感器和電容器的 LC 電路可提供一種低成本方法來產(chǎn)生所需的 AC 振蕩。 在這樣的 LC 電路中,電容器以電能形式存儲(chǔ)能量,線圈則以磁場(chǎng)形式存儲(chǔ)能量。 當(dāng)電容器受到激勵(lì)時(shí),它首先充電,其電壓直至達(dá)到 DC 電源電壓。 當(dāng)電容器充滿且電源電流切斷后,電容器開始通過線圈放電。 隨著通過線圈的電流開始上升,電容器的電壓開始下降。 這種逐漸上升的電流在線圈周圍產(chǎn)生一個(gè)磁場(chǎng)。 電容器完全放電后,電容器之前存儲(chǔ)的能量現(xiàn)在存儲(chǔ)在電感線圈中。
由于電路中沒有外部電壓來維持線圈中的電流,因此電流又流回電容器進(jìn)行重新充電。 這整個(gè)周期不斷重復(fù),便在兩個(gè)電路元件之間產(chǎn)生周期性的能量傳遞。 電感器和電容器之間的能量傳遞導(dǎo)致電壓極性發(fā)生變化,最后產(chǎn)生交流電壓和電流波形。
每次在這兩個(gè)電路元件之間傳遞能量時(shí),發(fā)生的損耗均會(huì)使振蕩衰減。 這是由于阻性電路元件造成的,它們會(huì)隨時(shí)間的流逝而消散能量。 在每半個(gè)振蕩周期,振蕩的幅度會(huì)減弱,直到電路完全沒電。 這一阻尼過程在有金屬物體靠近線圈時(shí)會(huì)加速,原因是在物體內(nèi)部會(huì)產(chǎn)生渦電流。
為了確定導(dǎo)電物體是否存在,一種微控制器 (MCU) 算法可測(cè)量振蕩波幅度。 一般來說,MCU 會(huì)按一定間隔測(cè)量電路中的電壓并與基準(zhǔn)電壓進(jìn)行比較。 如果與沒有外部阻尼的情況相比,輸入電壓降到低于此基準(zhǔn)電壓的速度更快,MCU 便會(huì)觸發(fā)一個(gè)接近事件。 通過分析接近事件的頻率,便可表明氣體或液體推動(dòng)槳片繞軸旋轉(zhuǎn)時(shí)的流速。
低能量系統(tǒng)(如物聯(lián)網(wǎng)流量傳感器)的問題在于:簡單的實(shí)現(xiàn)都要求喚醒 MCU,以便按一定間隔生成激勵(lì)信號(hào)以及對(duì) A/D 轉(zhuǎn)換器 (ADC) 輸入進(jìn)行采樣。 如果已知流速較慢,那么 MCU 可以長時(shí)間休眠,只要間歇性喚醒進(jìn)行讀數(shù)即可。 但是,此類策略無法適應(yīng)流速變化并面臨錯(cuò)失重要接近事件的風(fēng)險(xiǎn),從而導(dǎo)致流速低估。 如果 MCU 采用更活躍的占空比,可能會(huì)出現(xiàn)被喚醒但經(jīng)常發(fā)現(xiàn)狀態(tài)變化極小的情況,因而浪費(fèi)處理周期和能量,縮短了電池的使用壽命。
為了解決這一難題,可以將更多的傳感器處理操作轉(zhuǎn)移到硬件外設(shè)。 通常,這些外設(shè)的運(yùn)行能耗比 MCU 低得多,MCU 需要相對(duì)高的時(shí)鐘速率,且必須不斷地從存儲(chǔ)器加載指令和數(shù)據(jù)才能執(zhí)行任務(wù)。 硬件電路則更為精簡,可在 MCU 處于低功耗休眠模式時(shí)以更低的時(shí)鐘速率來運(yùn)行。
在諸如 NXP Kinetis L 系列之一的 MCU 上,定時(shí)器和比較器可以配合執(zhí)行大部分所需的傳感器處理工作。 如果流量可逆,該方案可輕松擴(kuò)展到正交等測(cè)量方案,其中兩個(gè)基于線圈的傳感器之間的角度為 90 度。 傳感器在不同的時(shí)間檢測(cè)導(dǎo)電槳片的經(jīng)過情況,并使用相對(duì)定時(shí)確定速度和方向。
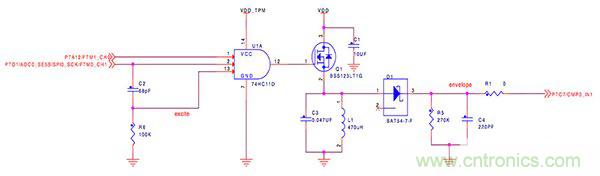
圖 1: 該電路用于通過與 (AND) 門將 NXP Kinetis L 上定時(shí)器輸出連接到基于線圈的流量傳感器,從而縮短激勵(lì)脈沖。
在此類方案中,兩個(gè)定時(shí)器 TPM0、TPM1 可從一個(gè) 32 kHz 晶體直接計(jì)時(shí),以便在 CPU 處于深度休眠模式時(shí)保持運(yùn)行。 定時(shí)器繼續(xù)對(duì)時(shí)鐘計(jì)數(shù),并且如果處于 PWM 模式,定時(shí)器的輸出可能會(huì)在用于生成傳感器控制信號(hào)的引腳上傳遞。 這些信號(hào)可以控制傳感器的激勵(lì),同時(shí)導(dǎo)通一個(gè)晶體管并以采樣頻率短期提供電流。
實(shí)際上,充電時(shí)間要比 32 kHz 時(shí)鐘的周期時(shí)間短得多,因此可以設(shè)置晶體管,以便通過帶有與 (AND) 門的 RC 電路生成更短的脈沖。 電阻和電容值從 MCU 定時(shí)器上激勵(lì)信號(hào)上升沿提供對(duì)與 (AND) 門的延遲響應(yīng),使其可以充當(dāng)一個(gè)脈沖生成器。
激勵(lì)脈沖結(jié)束后,MCU 的比較器讀取傳感器的電壓并生成邏輯 1,表示電壓高于設(shè)定閾值時(shí)的無阻尼脈沖。 如果使用正交測(cè)量,則比較器的多路復(fù)用器選擇待測(cè)量的傳感器信號(hào)。 比較器的控制方式是通過定時(shí)器信號(hào)控制 Kinetis MCU 的存儲(chǔ)器直接訪問 (DMA)。 經(jīng)過預(yù)定義的掃描周期次數(shù)后,MCU 被喚醒以便對(duì) DMA 控制器從比較器傳遞到片載 RAM 的結(jié)果進(jìn)行處理。
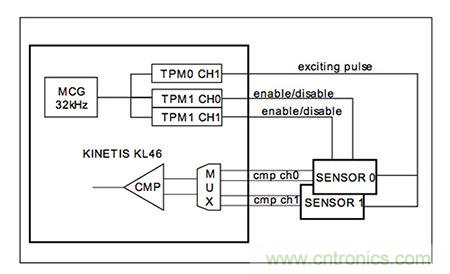
圖 2: 用于正交流量傳感的 Kinetis L MCU 上定時(shí)器和比較器的配置。
可配置控制塊為系統(tǒng)設(shè)計(jì)人員提供了更大的靈活性。 Silicon Labs 通過 Gecko 系列 MCU 實(shí)現(xiàn)的 LESENSE 外設(shè)控制器就是一個(gè)例子。 為了自主分析傳感器結(jié)果,LESENSE 解碼器能夠?yàn)橛邢逘顟B(tài)機(jī)定義最多 16 個(gè)狀態(tài),并定義狀態(tài)轉(zhuǎn)換時(shí)的可編程操作。 這樣解碼器就可以實(shí)現(xiàn)更大范圍的解碼方案,如正交解碼。 RAM 塊可用于存儲(chǔ)配置和測(cè)量結(jié)果。 這樣 LESENSE 就有了相對(duì)較大的結(jié)果緩沖區(qū),從而使 MCU 在收集傳感器數(shù)據(jù)時(shí)可以長時(shí)間保持低能量模式。
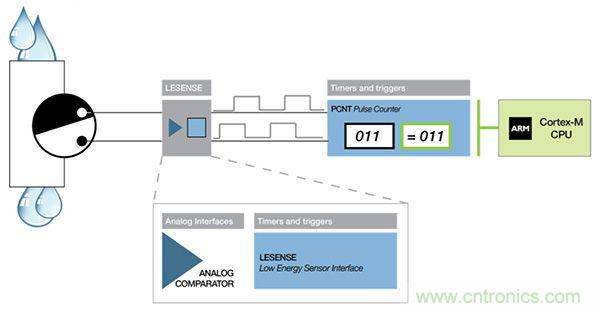
圖 3: 使用 Silicon Labs Gecko MCU 的正交流量測(cè)量設(shè)置示例。
借助 LESENSE,MCU 上的比較器可充當(dāng)脈沖發(fā)生器和計(jì)數(shù)器。 在狀態(tài)機(jī)控制下的 DAC 輸出生成激勵(lì)脈沖后,比較器隨著 LC 電路振蕩而在高低狀態(tài)之間切換。 在阻尼狀態(tài)下,這表示靠近導(dǎo)電物體,其中激勵(lì)信號(hào)后的脈沖數(shù)量將比無阻尼狀態(tài)下少很多。 狀態(tài)機(jī)記錄脈沖計(jì)數(shù)并保存在存儲(chǔ)器中。
LESENSE 塊能夠處理正交傳感器的輸入以指明方向變化,還可以在取得一個(gè)或多個(gè)正讀數(shù)之后進(jìn)行編程以激活 MCU。 這樣就避免了預(yù)定讀數(shù)后軟件的操作,因?yàn)樗羞@些讀數(shù)可能為負(fù)。
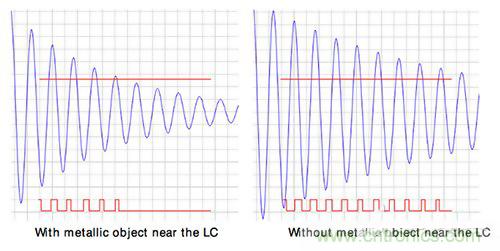
圖 4: 有關(guān)脈沖串的振蕩阻尼影響(由基于 Silicon Labs LESENSE 的檢測(cè)系統(tǒng)生成)。
Silicon Labs 的經(jīng)驗(yàn)型研究結(jié)果表明,390 µH 線圈最多可檢測(cè) 6 mm 金屬物體,并且采樣頻率為 20 Hz 時(shí),在 Gecko 的深度休眠模式中僅使用 200 nA 電流,這樣振蕩器和其他輔助電路總共消耗 1.2 μA。
通過將流量傳感器測(cè)量分流到硬件,可以使 CPU 內(nèi)核休眠更長時(shí)間,同時(shí)不會(huì)導(dǎo)致軟件的頻繁處理消耗更多的電流,這樣可使單電池充電的系統(tǒng)維持更長的時(shí)間。
推薦閱讀:



