

【導(dǎo)讀】看完《高速設(shè)計(jì)的三座大山——串聯(lián)電阻對信號的影響》的小伙伴們,有木有發(fā)現(xiàn)匹配最好的串聯(lián)端接電阻的阻值不是50ohm,而是30ohm。這是為什么呢?
看完(2)的小伙伴們,有木有發(fā)現(xiàn)匹配最好的串聯(lián)端接電阻的阻值不是50ohm,而是30ohm,如下圖。這是為什么呢?
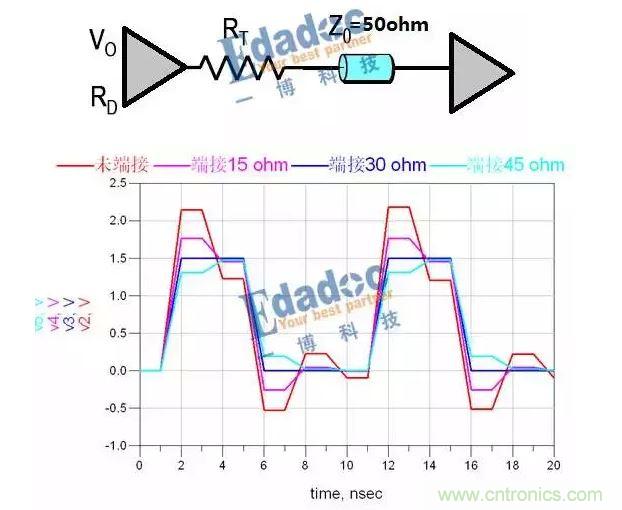
對高速數(shù)字電路設(shè)計(jì)有一定了解的人就知道,其實(shí)驅(qū)動器本身有內(nèi)阻,做串聯(lián)端接匹配時(shí),串聯(lián)電阻的阻值和驅(qū)動內(nèi)阻加起來大致等于傳輸線阻抗就可以了,即R_D+R_T≈Z_0 。
這個(gè)時(shí)候,有童鞋可能就要跳起來了,MR''S,你說的倒是容易,我也知道驅(qū)動內(nèi)阻R_D 加串聯(lián)電阻等于傳輸線阻抗這個(gè)公式,大家都知道,so easy啊,問題在于,傳輸線阻抗可以很輕松的在datasheet找到,可是驅(qū)動器內(nèi)阻上哪兒去找, datasheet上又沒有?
下圖是一個(gè)簡單的驅(qū)動電路。
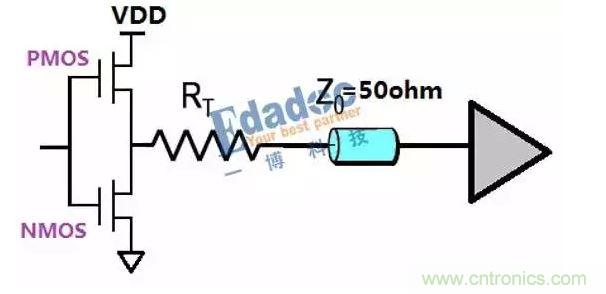
當(dāng)驅(qū)動器持續(xù)輸出高電平時(shí),PMOS管導(dǎo)通,NMOS關(guān)閉,電流流經(jīng)PMOS輸出,這個(gè)時(shí)候電流感受到的驅(qū)動內(nèi)阻RD是PMOS管的導(dǎo)通電阻R_P;反之,當(dāng)電流持續(xù)輸出低電平時(shí),電流感受到的驅(qū)動內(nèi)阻RD就是NMOS管的導(dǎo)通電阻RN 。一般情況下,PMOS管的導(dǎo)通電阻R_P 比NMOS管的導(dǎo)通電阻R_N 要大,這是它們的工藝所決定的,從上一篇(2)中,我們可以知道,輸出高電平時(shí),其RC時(shí)間常數(shù)會大,上升沿更緩。有時(shí)候,我們看到信號的上升沿比下降沿要更緩一些,就是這個(gè)原因啦。
下面,我們來看一下怎樣得到驅(qū)動內(nèi)阻的阻值?先使用仿真工具搭建兩個(gè)簡單的電路,如下:
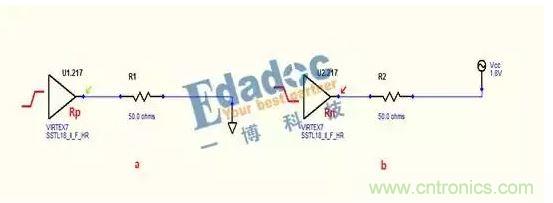
以Xilinx V7芯片DDR2驅(qū)動為例,在圖a的驅(qū)動端中加入上升沿驅(qū)動(PMOS導(dǎo)通),通過50ohm電阻下拉到地,通過電阻分壓的原理,即V_meas=50/(50+R_P )×VCC,可以求的R_P的值。
在圖b中驅(qū)動端加入下降沿驅(qū)動(NMOS導(dǎo)通),通過50ohm電阻上拉到VCC,通過電阻分壓的原理,即V_meas=R_N/(50+R_N )×VCC,可以求得R_N的值。下圖是仿真得到的波形:
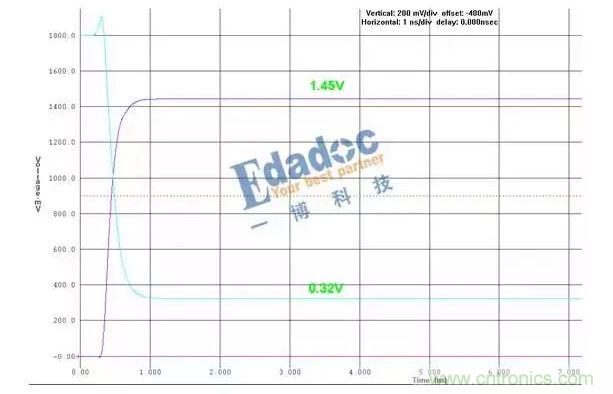
通過計(jì)算可以得到,R_P=12.1 ohm,R_N=10.8 ohm,兩個(gè)阻抗值相差不大,選取任何一個(gè)值來計(jì)算端接電阻,都可以。通過這樣簡單的仿真,我們就可以獲得驅(qū)動器的驅(qū)動內(nèi)阻啦。
有時(shí)候,我們還會遇到這兩個(gè)值差別比較大的情況,比如R_P=20ohm,R_N=10ohm,那這個(gè)時(shí)候我們要怎么選擇呢?如果選擇R_P來計(jì)算匹配電阻,則匹配電阻R_T=30 ohm,高電平匹配很好,低電平時(shí),匹配電阻就偏小,信號傳輸?shù)絺鬏斁€端時(shí)會出現(xiàn)正反射,過沖較大;如果選擇R_N來計(jì)算匹配電阻,則R_T=40ohm,低電平匹配很好,高電平時(shí),匹配電阻就偏大,信號傳輸?shù)絺鬏斁€時(shí)出現(xiàn)負(fù)反射,上升沿會出現(xiàn)臺階,另外,上升沿還會因?yàn)镽_T的增大而變緩。所以,這兩種選擇有利有弊,遇到這種情況時(shí),就需要設(shè)計(jì)者酌(zi)情(qiu)考(duo)量(fu)啦。
不過我可以給大家泄露一個(gè)天機(jī),假如你遇到了這種情況,你可以悄悄的來找高速先生幫你評估。




