
【導(dǎo)讀】很多現(xiàn)代人都非常注重自己的日常鍛煉,計(jì)步作為一種有效記錄監(jiān)控鍛煉的監(jiān)控手段,三軸加速度傳感器,可以知道用戶的運(yùn)動(dòng)狀態(tài)。本文將為大家講解依靠加速度測(cè)算的計(jì)步器實(shí)現(xiàn)原理,及計(jì)步測(cè)算法。
現(xiàn)如今,很多現(xiàn)代人都非常注重自己的日常鍛煉,計(jì)步作為一種有效記錄監(jiān)控鍛煉的監(jiān)控手段,被廣泛應(yīng)用在移動(dòng)終端的應(yīng)用中。
目前,大部分的計(jì)步都是通過GPS信號(hào)來測(cè)算運(yùn)動(dòng)距離,再反推行走步數(shù)實(shí)現(xiàn)的。這種方法很是有效,但在室內(nèi)或沒有GPS信號(hào)的設(shè)備上無法工作。同時(shí),GPS精度對(duì)結(jié)果的干擾也比較大。
為避免上述問題的出現(xiàn),我們可以考慮一種新的測(cè)步方法,即:通過設(shè)備上的加速度傳感器來計(jì)算步數(shù),在不支持GPS的設(shè)備上也可正常工作。還可以與GPS互相配合測(cè)步,這樣可令使用場(chǎng)景變得多樣。
1.先要摸清模型的特征
目前,大部分設(shè)備都提供了可以檢測(cè)各個(gè)方向的加速度傳感器。以iOS設(shè)備為例,我們利用了其三軸加速度傳感器(x,y,z軸代表方向如圖)的特性來分析。分別用以檢測(cè)人步行中三個(gè)方向的加速度變化。

iOS設(shè)備的三軸加速度傳感器示意圖
用戶在水平步行運(yùn)動(dòng)中,垂直和前進(jìn)兩個(gè)加速度會(huì)呈現(xiàn)周期性變化,如圖所示。在步行收腳的動(dòng)作中,由于重心向上單只腳觸地,垂直方向加速度是呈正向增加的趨勢(shì),之后繼續(xù)向前,重心下移兩腳觸底,加速度相反。水平加速度在收腳時(shí)減小,在邁步時(shí)增加。
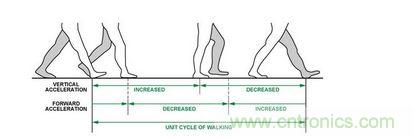
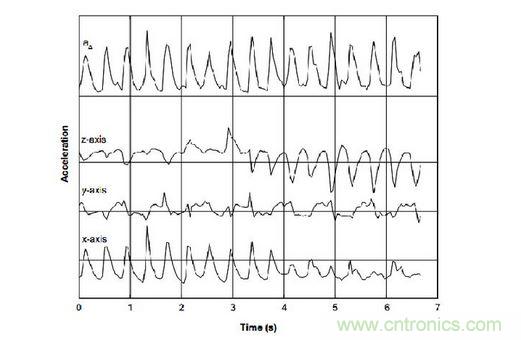
反映到圖表中,可以看到,在步行運(yùn)動(dòng)中,垂直和前進(jìn)產(chǎn)生的加速度與時(shí)間大致為一個(gè)正弦曲線,而且在某點(diǎn)有一個(gè)峰值。其中,垂直方向的加速度變化最大,通過對(duì)軌跡的峰值進(jìn)行檢測(cè)計(jì)算和加速度閥值決策,即可實(shí)時(shí)計(jì)算用戶運(yùn)動(dòng)的步數(shù),還可依此進(jìn)一步估算用戶步行距離。
2.計(jì)步的合理算法
因?yàn)橛脩粼谶\(yùn)動(dòng)中可能用手平持設(shè)備,或者將設(shè)備置于口袋中。所以,設(shè)備的放置方向不定。為此,通過計(jì)算三個(gè)加速度的矢量長(zhǎng)度,我們可以獲得一條步行運(yùn)動(dòng)的正弦曲線軌跡。
第二步是峰值檢測(cè),我們記錄了上次矢量長(zhǎng)度和運(yùn)動(dòng)方向,通過矢量長(zhǎng)度的變化,可以判斷目前加速度的方向,并和上一次保存的加速度方向進(jìn)行比較。如果是相反的,即是剛過峰值狀態(tài),則進(jìn)入計(jì)步邏輯進(jìn)行計(jì)步,否則舍棄。通過對(duì)峰值的次數(shù)累加,可得到用戶步行的步伐。
最后,就是去干擾。手持設(shè)備會(huì)有一些低幅度和快速的抽動(dòng)狀態(tài),或是我們俗稱的手抖,或者某個(gè)惡作劇用戶想通過短時(shí)快速反復(fù)搖動(dòng)設(shè)備來模擬人走路,這些干擾數(shù)據(jù)如果不剔除,會(huì)影響記步的準(zhǔn)確值,對(duì)于這種干擾,我們可以通過給檢測(cè)加上閥值和步頻判斷來過濾。
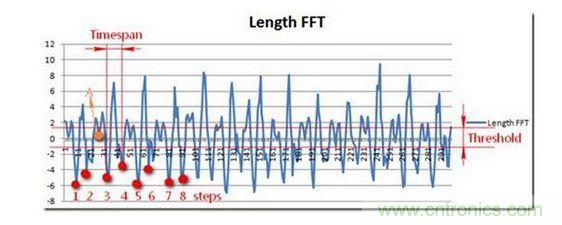
人體最快的跑步頻率為5HZ,也就是說相鄰兩步的時(shí)間間隔的至少大于0.2秒,如圖所示,我們?cè)O(shè)置了timespan在記步過程中我們過濾了高頻噪聲,即步頻過快的情況。同時(shí)我們通過和上次加速度大小進(jìn)行比較,設(shè)置設(shè)立一定的閥值Threshold來判斷運(yùn)動(dòng)是否屬于有效,有效運(yùn)動(dòng)才可進(jìn)行記步。
3.關(guān)于計(jì)步器的擴(kuò)展
以上是一個(gè)依靠加速度測(cè)算的計(jì)步器實(shí)現(xiàn)原理,已知步行和跑步的步伐經(jīng)驗(yàn)值,那么稍微改進(jìn)下即可變成一個(gè)測(cè)距測(cè)速計(jì)。
通過三軸加速度傳感器,我們可以知道用戶的運(yùn)動(dòng)狀態(tài)。除了計(jì)步,還可以通過加速器的變化曲線判斷用戶摔倒?fàn)顟B(tài),做成一個(gè)老人和兒童摔倒檢測(cè)自動(dòng)報(bào)警器。


