

【導讀】這兩個名詞相信很多人并不陌生,但是要說這兩種方案從原理、性能到成本、應用上到底孰優(yōu)孰劣,以及背后的原因是什么,也許每個人都還或多或少有所疑惑。
激光雷達作為眾多智能設備的核心傳感器,其應用已經(jīng)非常廣泛。如今我們能夠在無人駕駛小車、服務機器人、AGV 叉車、智能路政交通以及自動化生產(chǎn)線上頻頻看到激光雷達的身影,也足以說明它在人工智能產(chǎn)業(yè)鏈上不可或缺的地位。
就目前市面上的主流激光雷達產(chǎn)品而言,用于環(huán)境探測和地圖構(gòu)建的雷達,按技術(shù)路線大體可以分為兩類,一類是TOF(Time of Flight,時間飛行法)雷達,另一類是三角測距法雷達。這兩個名詞相信很多人并不陌生,但是要說這兩種方案從原理、性能到成本、應用上到底孰優(yōu)孰劣,以及背后的原因是什么,也許每個人都還或多或少有所疑惑。今天小編就拋磚引玉,就這些問題做一次解析。
一、原理
三角法的原理如下圖所示,激光器發(fā)射激光,在照射到物體后,反射光由線性CCD 接收,由于激光器和探測器間隔了一段距離,所以依照光學路徑,不同距離的物體將會成像在CCD 上不同的位置。按照三角公式進行計算,就能推導出被測物體的距離。
光看原理,是不是覺得挺簡單。
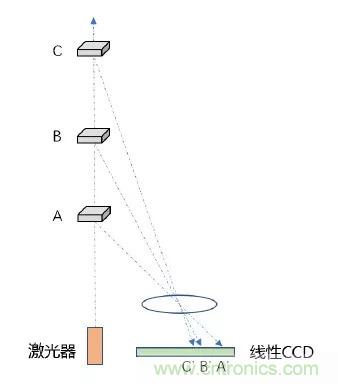
圖1、三角法測距原理
然而TOF 的原理更加簡單。如圖2 所示,激光器發(fā)射一個激光脈沖,并由計時器記錄下出射的時間,回返光經(jīng)接收器接收,并由計時器記錄下回返的時間。兩個時間相減即得到了光的“飛行時間”,而光速是一定的,因此在已知速度和時間后很容易就可以計算出距離。
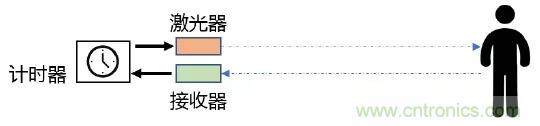
圖2、TOF 測距原理
可惜的是,要是所有事情做起來都如同想起來一樣簡單,那世界就太美好了。這兩種方案在具體實現(xiàn)時都會有各自的挑戰(zhàn),但是相比起來,TOF 要攻克的難關顯然要多得多。
TOF 雷達的實現(xiàn)難點主要在于:
1. 首先是計時問題。在TOF 方案中,距離測量依賴于時間的測量。但是光速太快了,因此要獲得精確的距離,對計時系統(tǒng)的要求也就變得很高。一個數(shù)據(jù)是,激光雷達要測量1cm 的距離,對應的時間跨度約為65ps。稍微熟悉電氣特性的同學應該就知道這背后對電路系統(tǒng)意味著什么。
2. 其次是脈沖信號的處理。這里面又分兩個部分:
a) 一個是激光的:三角雷達里對激光器驅(qū)動幾乎沒什么要求,因為測量依賴的激光回波的位置,所以只需要一個連續(xù)光出射就可以了。但是TOF 卻不行,不光要脈沖激光,而且質(zhì)量還不能太差,目前TOF 雷達的出射光脈寬都在幾納秒左右,上升沿更是要求越快越好,因此每家產(chǎn)品的激光驅(qū)動方案也是有高低之分的。
b) 另一個是接收器的。一般來說回波時刻鑒別其實是對上升沿的時間鑒別,因此在對回波信號處理時,必須保證信號盡量不要失真。另外,即便信號沒有失真,由于回波信號不可能是一個理想的方波,因此在同一距離下對不同物體的測量也會導致前沿的變動。比如對同一位置的白紙和黑紙的測量,可能得到如下圖的兩個回波信號,而時間測量系統(tǒng)必須測出這兩個前沿是同一時刻的(因為距離是同一距離),這就需要特別的處理。
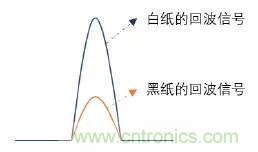
圖3、不同反射率的回波信號差異
除此以外,接收端還面臨著信號飽和、底噪處理等等問題,可以說困難重重。
二、性能PK,知其然可知其所以然?
說了這么多,其實從下游用戶的角度,并不關心你實現(xiàn)起來簡單還是難。用戶最關心的不外乎兩點:性能和價格。先說性能,如果了解這個行業(yè)的人大多知道,TOF 雷達從性能上是優(yōu)于三角雷達的。但是具體體現(xiàn)在哪些方面,背后的原因又是什么呢?
1. 測量距離
從原理上來說,TOF 雷達可以測量的距離更遠。實際上,在一些要求測量距離的場合,比如無人駕駛汽車應用,幾乎都是TOF 雷達。三角雷達測不遠,主要有幾個方面的原因:一是原理上的限制,其實仔細觀察圖1 不難發(fā)現(xiàn),三角雷達測量的物體距離越遠,在CCD 上的位置差別就越小,以致于在超過某個距離后,CCD 幾乎無法分辨。二是三角雷達沒辦法像TOF 雷達那樣獲得較高的信噪比。TOF 采用脈沖激光采樣,并且還能嚴格控制視場以減少環(huán)境光的影響。這些都是長距離測量的前提條件。
當然,距離長短并不代表絕對的好壞,這取決于具體的使用場景。
2. 采樣率
激光雷達描繪環(huán)境時,輸出的是點云圖像。每秒能夠完成的點云測量次數(shù),就是采樣率。在轉(zhuǎn)速一定的情況下,采樣率決定了每一幀圖像的點云數(shù)目以及點云的角分辨率。角分辨率越高,點云數(shù)量越多,則圖像對周圍環(huán)境的描繪就越細致。
就市面上的產(chǎn)品而言,三角法雷達的采樣率一般都在20k 以下,TOF 雷達則能做到更高(例如星秒的TOF 雷達PAVO 最高可以達到100k 的采樣率)。究其原因,TOF 完成一次測量只需要一個光脈沖,實時時間分析也能很快響應。但是三角雷達需要的運算過程耗時則更長。
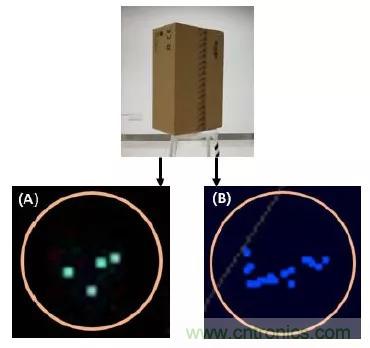
圖4、對同一位置物體,不同采樣率的成像效果
(A):低采樣率點云圖樣;(B):高采樣率點云圖樣(PAVO)
3. 精度
激光雷達本質(zhì)上是個測距設備,因此距離的測量精度是毫無疑問的核心指標。在這一點上,三角法在近距離下的精度很高,但是隨著距離越來越遠,其測量的精度會越來越差,這是因為三角法的測量和角度有關,而隨著距離增加,角度差異會越來越小。所以三角雷達在標注精度時往往都是采用百分比的標注(常見的如1%),那么在20m 的距離時最大誤差就在20cm。而TOF 雷達是依賴飛行時間,時間測量精度并不隨著長度增加有明顯變化,因此大多數(shù)TOF 雷達在幾十米的測量范圍內(nèi)都能保持幾個厘米的精度。
4. 轉(zhuǎn)速(幀率)
在機械式雷達中,圖像幀率就是由電機的轉(zhuǎn)速決定的。就目前市面上的二維激光雷達而言,三角雷達的最高轉(zhuǎn)速通常在20Hz 以下,TOF 雷達則可以做到30Hz-50Hz 左右。通常三角雷達通常采用采用上下分體的結(jié)構(gòu),即上面轉(zhuǎn)的部分負責激光發(fā)射、接收和采集,下部分負責電機驅(qū)動和供電等,過重的運動組件限制了更高的轉(zhuǎn)速。而TOF 雷達通常采用一體化的半固態(tài)結(jié)構(gòu),電機僅需帶動反射鏡,因此電機的功耗很小,并且可以支持的轉(zhuǎn)速也更高。
當然,這里提到的轉(zhuǎn)速的區(qū)別只是對現(xiàn)有產(chǎn)品的一個客觀分析。其實轉(zhuǎn)速和雷達采用TOF 還是三角法沒有本質(zhì)的聯(lián)系,主流的多線TOF 雷達也都是采用的上下分體的結(jié)構(gòu),畢竟同軸結(jié)構(gòu)的光學設計受到許多限制。多線TOF 雷達的轉(zhuǎn)速一般也都在20Hz 以下。
不過,高轉(zhuǎn)速(或者說高幀率)對點云成像效果是很有意義的。高幀率更利于捕捉高速運動的物體,比如高速公路上行駛的車輛。此外,在自身建圖時,運動中的雷達建圖會發(fā)生畸變(舉個例子,如果一個靜止的雷達掃描一圈是一個圓,那么當雷達直線運動時,掃描出的圖像就變成一個橢圓)。顯然,高轉(zhuǎn)速可以更好的減少這種畸變的影響。
三、成本
如果只看性能比較,似乎TOF 雷達的性能完全壓過三角雷達。不過產(chǎn)品的競爭并不僅僅是性能參數(shù)的比拼,用戶在乎的還有價格、穩(wěn)定性和服務等等。
至少在成本方面,目前三角雷達的成本是低于TOF 雷達的,近距離的三角雷達成本已經(jīng)在百元級別。而目前進口TOF 雷達的售價動輒就要萬元以上??梢哉f,高昂的價格是限制TOF 激光雷達應用進一步拓展的重要因素。
不過,隨著近年來國內(nèi)TOF 雷達廠商的崛起,TOF 雷達的成本已經(jīng)得到大幅的降低,國產(chǎn)TOF 雷達產(chǎn)品的價格相比于進口品牌,已經(jīng)有相當大的競爭力。未來,隨著生產(chǎn)工藝的完善和出貨量的進一步提升,相信TOF 雷達的成本還會進一步壓縮,降到和三角雷達相近的水平也不是沒有可能。
四、應用場景
三角雷達的場景主要是在室內(nèi)短距離的應用,最典型的場景就是掃地機器人。而在探測范圍較大場景(比如商場、機場或者車站),以及室外場景,TOF 的應用則更為廣泛。另外值得一提的是,三角雷達這種裸露在外轉(zhuǎn)動的方案,使其產(chǎn)品在防塵防水方面非常脆弱,在一些特殊場景的應用,比如AVG 小車工作的車間經(jīng)常會有很多灰塵,在這種環(huán)境下,三角雷達的電機非常容易損壞。相比之下,TOF 雷達采用的半固態(tài)設計,可以有更優(yōu)秀的防護效果,工作壽命也更長。
圖5、星秒TOF 激光雷達PAVO
目前,國內(nèi)TOF 雷達正在迅速發(fā)展,星秒(SIMINICS)推出的2D TOF 激光雷達PAVO,可以達到20m 的測量距離,100kHz 的點云速率,0.036°的最高角度分辨率,以及IP65 的防護等級,其應用已經(jīng)涉及到無人駕駛、機器人、AGV、安防、路政等諸多領域,是國產(chǎn)TOF雷達的優(yōu)秀代表。
推薦閱讀:
看圖學器件原理 - 電感器、電容器及其在電源變換中的應用



