

【導(dǎo)讀】近年來,隨著多旋翼消費(fèi)級無人機(jī)市場的飛速增長,其相關(guān)技術(shù)也正在發(fā)生日新月異的變革,以往多用于特種行業(yè)甚至軍用產(chǎn)品上的技術(shù)(如飛行控制、圖像傳輸、目標(biāo)識別和跟蹤等)也越來越多地用于消費(fèi)級無人機(jī),使其越來越接近于自動(dòng)化甚至智能化飛行機(jī)器人的概念。

在消費(fèi)級無人機(jī)技術(shù)的諸多趨勢中,避障能力是實(shí)現(xiàn)自動(dòng)化乃至智能化的關(guān)鍵環(huán)節(jié),完善的自主避障系統(tǒng)將能夠在很大程度上減少因操作失誤造成的無人機(jī)損壞和傷及人身和建筑物的事故發(fā)生率,而從各消費(fèi)級無人機(jī)廠商的新品和技術(shù)發(fā)展方向看,避障技術(shù)也將在未來幾年趨于完善并成為中高端消費(fèi)級無人機(jī)的標(biāo)配系統(tǒng)。
避障技術(shù),顧名思義就是無人機(jī)自主躲避障礙物的智能技術(shù)。很多玩過無人機(jī)的小伙伴們都知道,有避障功能的無人機(jī)和沒有避障功能的無人機(jī),可以說體驗(yàn)是大不相同的!無人機(jī)自動(dòng)避障系統(tǒng)能夠及時(shí)地避開飛行路徑中的障礙物,極大地減少因?yàn)椴僮魇д`而帶來的各項(xiàng)損失。在減少炸機(jī)事故次數(shù)的同時(shí),還能給無人機(jī)新手極大的幫助!

無人機(jī)避障技術(shù)的發(fā)展階段
根據(jù)目前無人機(jī)避障技術(shù)的發(fā)展以及其未來的研究態(tài)勢,無人機(jī)避障技術(shù)可分為三個(gè)階段,一是感知障礙物階段;二是繞過障礙物階段;三是場景建模 和路徑搜索階段。這三個(gè)階段其實(shí)是無人機(jī)避障技術(shù)的作用過程。從無人機(jī)發(fā)現(xiàn)障礙物,到可以自動(dòng)繞開障礙物,再達(dá)到自我規(guī)劃路徑的過程。

第一階段,無人機(jī)只能是簡單地感知障礙物。當(dāng)無人機(jī)遇到障礙物時(shí),能快速地識別,并且懸停下來,等待無人機(jī)駕駛者的下一步指令!
第二階段,無人機(jī)能夠獲取障礙物的深度圖象,并由此精確感知障礙物的具體輪廓,然后自主繞開障礙物!這個(gè)階段是擺脫飛手操作,實(shí)現(xiàn)無人機(jī)自主駕駛的階段!
第三階段,無人機(jī)能夠?qū)︼w行區(qū)域建立地圖模型然后規(guī)劃合理線路!這個(gè)地圖不能僅僅是機(jī)械平面模型,而應(yīng)該是一個(gè)能夠?qū)崟r(shí)更新的三維立體地圖!這將是目前無人機(jī)避障技術(shù)的最高階段!
感知障礙物
在前避障時(shí)代,消費(fèi)級無人機(jī)的使用說明上都會(huì)標(biāo)明必須在開闊場地飛行,而且應(yīng)當(dāng)盡量避免周圍有大量人群(當(dāng)然,這也與當(dāng)前技術(shù)和市場環(huán)境使得消費(fèi)級無人機(jī)產(chǎn)品的可靠性較差有很大關(guān)系),因?yàn)橐徊恍⌒牟僮魇д`,或者在周圍有高大障礙物時(shí)啟動(dòng)一鍵(低電壓、失控)返航,則有可能眼睜睜看著無人機(jī)傻傻地撞向那么明顯的障礙物,這是何等的回天乏力。為了降低這種事故的發(fā)生率,各廠商也都在卯足勁研發(fā)避障技術(shù),而在實(shí)現(xiàn)方式上,大家的著眼點(diǎn)也都放在了一個(gè)方向——測量無人機(jī)到障礙物的距離。

我們可以很容易地想到,只要無人機(jī)能夠測量出與潛在障礙物之間的距離,就可以在撞向障礙物之前停止前進(jìn)(雖然固定翼無人機(jī)表示不同意),于是一場讓人感覺回天乏力的事故被輕描淡寫地避免了,這種思路簡單粗暴,但還是有一定作用的。而當(dāng)前運(yùn)用較多的障礙物檢測方法主要有:
超聲波測距:這個(gè)方法很多人都熟悉,家用汽車的倒車?yán)走_(dá)就是利用超聲波檢測障礙物,該方法的優(yōu)點(diǎn)就是技術(shù)成熟,成本很低;但缺點(diǎn)在于作用距離近(常用的中低端超聲波傳感器作用距離不超過10m),且對反射面有一定要求。因此超聲波測距傳感器常用來測量無人機(jī)與地面的距離(固定翼無人機(jī)表示自己飛的太高太快,超聲波傳感器用不上)。
紅外/激光TOF:即飛行時(shí)間傳感器,基本原理就是傳感器發(fā)射一定頻率的紅外/激光信號,然后根據(jù)反射信號與原信號的相位差計(jì)算信號的飛行時(shí)間,即可換算出距離障礙物的距離。該方法技術(shù)比較成熟,作用距離較超聲波更遠(yuǎn)(數(shù)米到數(shù)百米),而且高等級的TOF傳感器可以獲得障礙物的深度圖像(這一項(xiàng)能力在下文會(huì)有應(yīng)用說明),但缺點(diǎn)在于成本高,抗干擾能力較差(激光TOF稍好)。因此該方案在當(dāng)前市場上產(chǎn)品或樣機(jī)中有一定規(guī)模的應(yīng)用。
雙目視覺:這個(gè)方法運(yùn)用了人眼估計(jì)距離的原理,即同一個(gè)物體在兩個(gè)鏡頭畫面中的坐標(biāo)稍有不同,經(jīng)過轉(zhuǎn)換即可得到障礙物的距離,雙目視覺方法也可以獲得障礙物的深度圖像。這種方法的缺點(diǎn)在于技術(shù)難度較高(不過自從有了OpenCV,媽媽再也不用擔(dān)心我不會(huì)寫機(jī)器視覺程序了),且距離估計(jì)的誤差隨距離變大而指數(shù)型增長,只是這一缺點(diǎn)在無人機(jī)避障應(yīng)用中并無大礙。
電子地圖:借助細(xì)粒度的數(shù)字高程地圖和城市3D建筑地圖,既能夠?qū)崿F(xiàn)避免重要建筑物受到無人機(jī)撞擊(即禁飛區(qū)功能),也能夠?qū)崿F(xiàn)很多情況下的無人機(jī)避障。而事實(shí)上,戰(zhàn)斧巡航導(dǎo)彈的遠(yuǎn)程飛行也在很大程度上依賴于數(shù)字高程地圖。
障礙物測量的原理搞懂了,就可以開始討論無人機(jī)避障了。最簡單的策略莫過于遇到障礙物時(shí)停止前進(jìn),然后與障礙物保持一定的距離。這種遇到障礙物后就默默懸停等待,仿佛手足無措不知所往的初級策略,就是這么簡單的開始,無人機(jī)就進(jìn)入了避障時(shí)代。
繞過障礙物
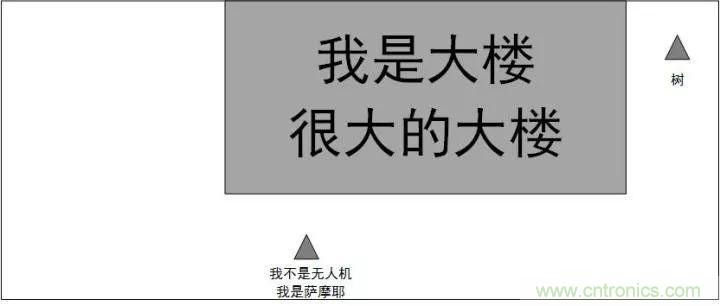
很顯然,我們不會(huì)滿足于讓無人機(jī)遇到障礙物后傻傻等待(固定翼表示自己一秒鐘也無法等待),這就需要設(shè)計(jì)讓無人機(jī)安全高效地繞過障礙物繼續(xù)完成預(yù)定飛行的策略。表面上看,連薩摩耶這種囧傻呆萌的狗狗都知道前面有座大樓時(shí)該怎么繞過去(請自行想象為什么說到狗狗時(shí)要強(qiáng)調(diào)前方是大樓,而不是一棵樹),讓無人機(jī)繞過障礙物的策略應(yīng)該很簡單了,但這其中的門道可多了去了。
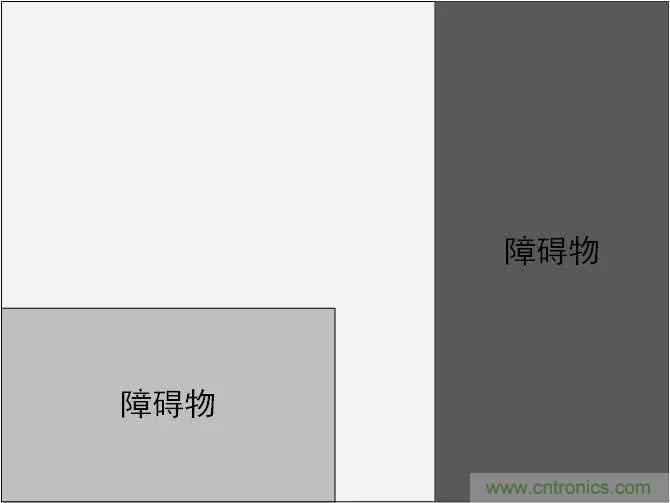
首先,狗狗很清楚前方大樓的輪廓,因此只需要往邊緣走就可以繞過去,但是無人機(jī)想獲得障礙物輪廓就很難了,如果避障傳感器是普通超聲波,無人機(jī)就只能知道前方有障礙,但是卻無從知道障礙物的邊緣,這就是前面為什么要強(qiáng)調(diào)“能夠獲得障礙物深度圖像”了,對于能獲得深度圖像的TOF測距和雙目視覺測距方式,只要障礙物沒有充滿視場,就總能夠找到障礙物的邊緣。舉例說明,下圖所示的是無人機(jī)的到的深度圖像示意圖,灰度越深,表明距離越近,遇到這種情況,很顯然的策略就是往左上方飛,即朝向灰度最淺的區(qū)域飛行,此時(shí)問題仿佛已經(jīng)得到解決。
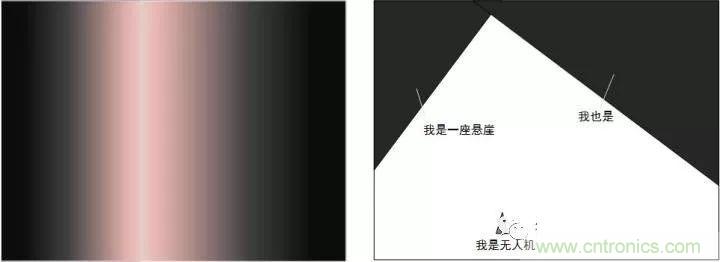
但是別高興太早,這種策略可以滿足大多數(shù)應(yīng)用場景,但是問題還遠(yuǎn)沒有解決,看下面的左圖,一架無人機(jī)剛繞從一座高大建筑旁繞過去,然后得到了如左圖的障礙物深度圖像,如果按照前面的策略,肯定是要往顏色最前的地方飛行,好那我要是告訴你其實(shí)右圖是無人機(jī)和兩座懸崖幾何關(guān)系的俯視圖,請你告訴我無人機(jī)會(huì)怎么飛,如果按照前述的策略,這又必將是一場刻骨銘心的事故。
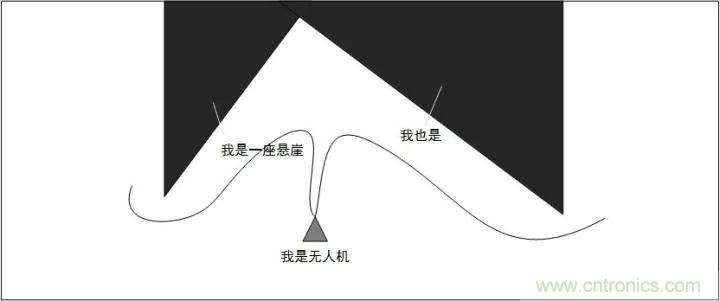
也許有人對windows98時(shí)代的迷宮屏保還有印象,屏保中,使用一直沿著左側(cè)墻壁和一直沿著右側(cè)墻壁都會(huì)最終走出迷宮,這是因?yàn)槠胀詫m的拓?fù)浣Y(jié)構(gòu)就是兩條平行線中間有一個(gè)通道,按照這種思路,無人機(jī)遇到下圖這種簡單策略躲不過去的障礙時(shí),完全可以采取類似的方式,就一直向左或者向右尋找出路。即如果上面右圖的局部場景的完整形態(tài)如果如下圖所示的話,沿著圖中的兩條曲線為路徑都可以繞過去,如果場景比下圖更復(fù)雜,繞過去的路可就需要苦苦追尋了。
雖然關(guān)于機(jī)器人在未知場景中的避障方法研究非常多,但是由于終究是未知場景,其中必然有復(fù)雜的搜索過程。
場景建模和路徑搜索
再回到狗狗繞過大樓的例子,看下圖,如果狗狗左側(cè)右側(cè)的路都走過,而且右側(cè)其實(shí)沒有那棵樹的話,很顯然的它下一次繞過這座樓的時(shí)候基本上會(huì)選擇左側(cè)的路(但是當(dāng)右側(cè)有顆邪惡的樹之后,結(jié)論仿佛有所改變),這是因?yàn)樗竽X里已經(jīng)有了一幅地圖,即有了這個(gè)場景的模型。
無人機(jī)也是如此,無論是基于電子地圖,還是其他來源,還是SLAM(即時(shí)定位與地圖構(gòu)建)獲得了場景模型,就可以在機(jī)載計(jì)算機(jī)里用算法去搜索優(yōu)化的避障路徑。當(dāng)前關(guān)于這種已知場景路徑規(guī)劃的研究很多,算法也是層出不窮(算法太多太復(fù)雜,本文暫不展開討論),也是無人機(jī)避障發(fā)展的必然趨勢。
與傳統(tǒng)的機(jī)器人避障技術(shù)研究相比,當(dāng)前無人機(jī)的避障還處于很初級的階段,但由于消費(fèi)級無人機(jī)市場的火爆,大家也都在爭先恐后地開展此類研究,可以預(yù)見,未來的避障時(shí)代中,將會(huì)有各自各樣現(xiàn)在難以想到的方法用于無人機(jī)避障,有了這些技術(shù)的輔助,無人機(jī)的操作也將越來越安全,越來越簡單。
無人機(jī)避障技術(shù)種類
紅外避障
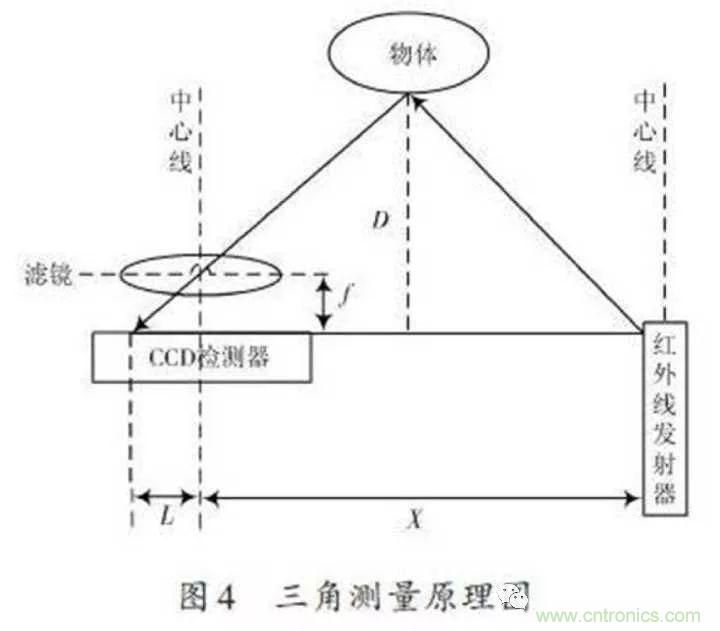
紅外線的應(yīng)用我們并不陌生:從電視、空調(diào)的遙控器,到酒店的自動(dòng)門,都是利用的紅外線的感應(yīng)原理。而具體到無人機(jī)避障上的應(yīng)用,紅外線避障的常見實(shí)現(xiàn)方式就是“三角測量原理”。
紅外感應(yīng)器包含紅外發(fā)射器與CCD檢測器,紅外線發(fā)射器會(huì)發(fā)射紅外線,紅外線在物體上會(huì)發(fā)生反射,反射的光線被CCD檢測器接收之后,由于物體的距離D不同,反射角度也會(huì)不同,不同的反射角度會(huì)產(chǎn)生不同的偏移值L,知道了這些數(shù)據(jù)再經(jīng)過計(jì)算,就能得出物體的距離了,如下圖所示。
超聲波避障
超聲波其實(shí)就是聲波的一種,因?yàn)轭l率高于20kHz,所以人耳聽不見,并且指向性更強(qiáng)。
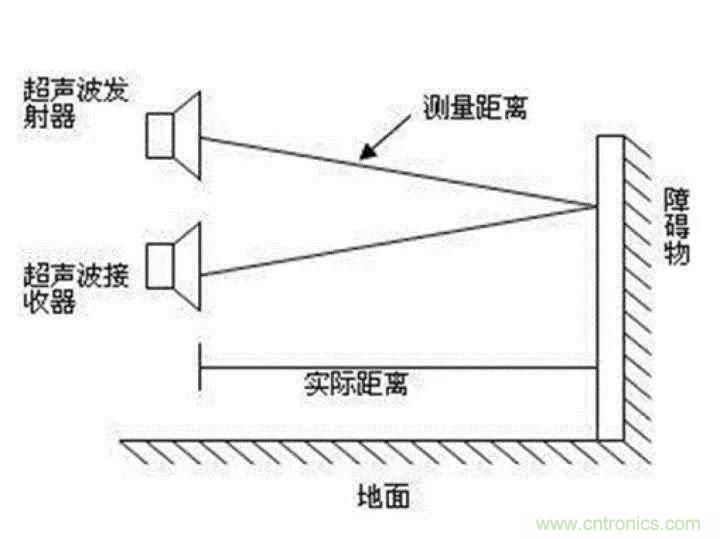
超聲波測距的原理比紅外線更加簡單,因?yàn)槁暡ㄓ龅秸系K物會(huì)反射,而聲波的速度已知,所以只需要知道發(fā)射到接收的時(shí)間差,就能輕松計(jì)算出測量距離,再結(jié)合發(fā)射器和接收器的距離,就能算出障礙物的實(shí)際距離,如下圖所示。
超聲波測距相比紅外測距,價(jià)格更加便宜,相應(yīng)的感應(yīng)速度和精度也遜色一些。同樣,由于需要主動(dòng)發(fā)射聲波,所以對于太遠(yuǎn)的障礙物,精度也會(huì)隨著聲波的衰減而降低,此外,對于海綿等吸收聲波的物體或者在大風(fēng)干擾的情況下,超聲波將無法工作。
激光避障
激光避障與紅外線類似,也是發(fā)射激光然后接收。不過激光傳感器的測量方式很多樣,有類似紅外的三角測量,也有類似于超聲波的時(shí)間差+速度。
但無論是哪種方式,激光避障的精度、反饋速度、抗干擾能力和有效范圍都要明顯優(yōu)于紅外和超聲波。
但這里注意,不管是超聲波還是紅外、亦或是這里的激光測距,都只是一維傳感器,只能給出一個(gè)距離值,并不能完成對現(xiàn)實(shí)三維世界的感知。當(dāng)然,由于激光的波束極窄,可以同時(shí)使用多束激光組成陣列雷達(dá),近年來此技術(shù)逐漸成熟,多用于自動(dòng)駕駛車輛上,但由于其體積龐大,價(jià)格昂貴,故不太適用于無人機(jī)。
視覺避障
解決機(jī)器人如何“看”的問題,也就是大家常聽到的計(jì)算機(jī)視覺(Computer Vision)。其基礎(chǔ)在于如何能夠從二維的圖像中獲取三維信息,從而了解我們身處的這個(gè)三維世界。
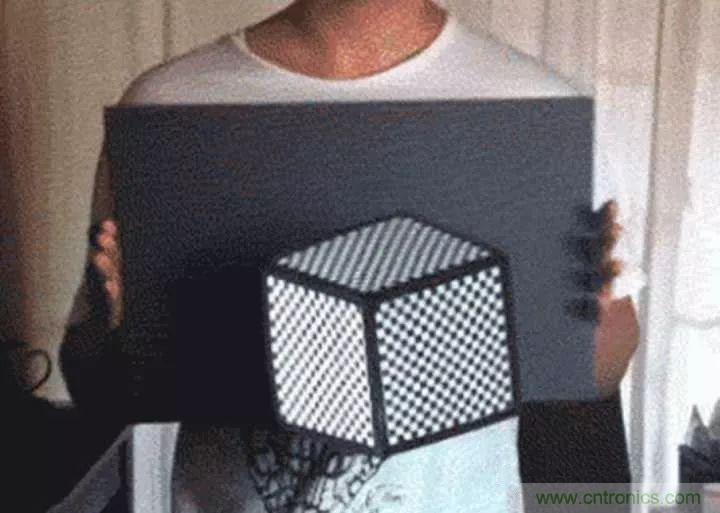
視覺識別系統(tǒng)通常來說可以包括一個(gè)或兩個(gè)攝像頭。單一的照片只具有二維信息,猶如2D電影,并無直接的空間感,只有靠我們自己依靠“物體遮擋、近大遠(yuǎn)小”等生活經(jīng)驗(yàn)?zāi)X補(bǔ)。故單一的攝像頭獲取到的信息及其有限,并不能直接得到我們想要的效果(當(dāng)然能夠通過一些其他手段,輔助獲取,但是此項(xiàng)還不成熟,并沒有大規(guī)模驗(yàn)證)。類比到機(jī)器視覺中,單個(gè)攝像頭的圖片信息無法獲取到場景中每個(gè)物體與鏡頭的距離關(guān)系,即缺少第三個(gè)維度。
如下圖所示,單一的圖片具有很強(qiáng)的迷惑性和不確定性
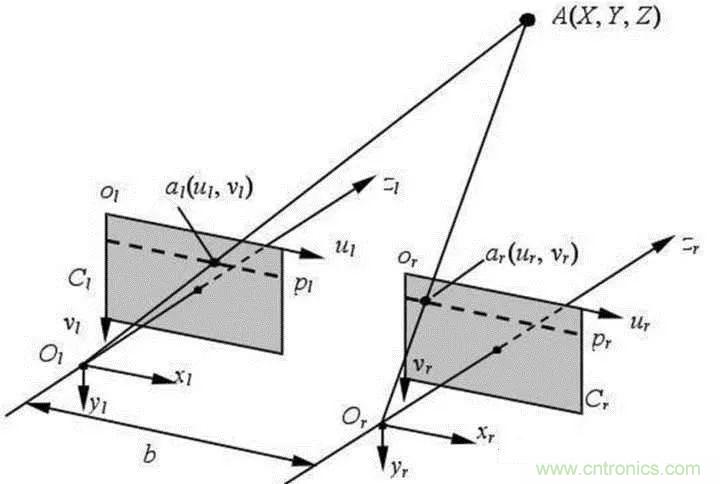
雙目立體視覺猶如3D電影(左右眼看到的場景略有差異),能夠直接給人帶來強(qiáng)烈的空間臨場感。類比機(jī)器視覺,從單個(gè)攝像頭升級到兩個(gè)攝像頭,即立體視覺(Stereo Vision)能夠直接提供第三個(gè)維度的信息,即景深(depth),能夠更為簡單的獲取到三維信息。雙目視覺最常見的例子就是我們的雙眼:我們之所以能夠準(zhǔn)確的拿起面前的杯子、判斷汽車的遠(yuǎn)近,都是因?yàn)殡p眼的雙目立體視覺,而3D電影、VR眼鏡的發(fā)明,也都是雙目視覺的應(yīng)用。
雙目視覺的基本原理是利用兩個(gè)平行的攝像頭進(jìn)行拍攝,然后根據(jù)兩幅圖像之間的差異(視差),利用一系列復(fù)雜的算法計(jì)算出特定點(diǎn)的距離,當(dāng)數(shù)據(jù)足夠時(shí)還能生成深度圖。

其實(shí),各個(gè)避障技術(shù)在無人機(jī)上都有用武之地,只是應(yīng)用場景有所不同,特別對于前視避障而言,有些技術(shù)就不適用了。
紅外和超聲波技術(shù),因?yàn)槎夹枰鲃?dòng)發(fā)射光線、聲波,所以對于反射的物體有要求,比如:紅外線會(huì)被黑色物體吸收,會(huì)穿透透明物體,還會(huì)被其他紅外線干擾;而超聲波會(huì)被海綿等物體吸收,也容易被槳葉氣流干擾。
而且,主動(dòng)式測距還會(huì)產(chǎn)生兩臺(tái)機(jī)器相互干擾的問題。相比之下,雖然雙目視覺也對光線有要求,但是對于反射物的要求要低很多,兩臺(tái)機(jī)器同時(shí)使用也不會(huì)互相干擾,普適性更強(qiáng)。
最重要的是,常見的紅外和超聲波目前都是單點(diǎn)測距,只能獲得特定方向上的距離數(shù)據(jù),而雙目視覺可以在小體積、低功耗的前提下,獲得眼前場景的比較高分辨率的深度圖,這就讓避障功能有了更多的發(fā)展空間,比如避障之后的智能飛行、路徑規(guī)劃等。
激光技術(shù)雖然也能實(shí)現(xiàn)類似雙目視覺的功能,但是受限于技術(shù)發(fā)展,目前的激光元件普遍價(jià)格貴、體積大、功耗高,應(yīng)用在消費(fèi)級無人機(jī)上既不經(jīng)濟(jì)也不實(shí)用。
無人機(jī)避障實(shí)現(xiàn)的難點(diǎn)
避障功能從構(gòu)思到實(shí)現(xiàn),走的每一步幾乎都便隨著無數(shù)的難題。僅僅是寫出有效的視覺識別或者地圖重構(gòu)的算法還只是第一步,能讓它在無人機(jī)這樣一個(gè)計(jì)算能力和功耗都有限制的平臺(tái)上流暢穩(wěn)定的跑起來,才是真正困難的地方。

此外,如何處理功能的邊界也是一個(gè)問題,比如雙目視覺在視線良好的情況下可以工作,那么當(dāng)有灰塵遮擋的情況下呢?這就需要不斷的實(shí)驗(yàn)和試錯(cuò),并且持續(xù)的優(yōu)化算法,保證各項(xiàng)功能在各類場景下都能正常工作,不會(huì)給出錯(cuò)誤的指令。
避障功能作為近年來無人機(jī)產(chǎn)品的大趨勢,帶來的最直接的好處就是,以往一些人為疏忽造成的撞擊,現(xiàn)在都能經(jīng)由避障功能去避免,既保障了無人機(jī)飛行安全的同時(shí),也避免了對周圍人員財(cái)產(chǎn)的損害,讓飛無人機(jī)的門檻進(jìn)一步得到了降低。
而長遠(yuǎn)來看,無人機(jī)想要普及到農(nóng)業(yè)、建筑、運(yùn)輸、媒體等領(lǐng)域,「智能化」肯定是必經(jīng)之路。
畢竟只有在飛行功能上做到智能控制,才有余量去滿足不同行業(yè)的需求。如今由“避障功能”而衍生出的一系列“智能飛行”功能,無疑就是“無人機(jī)智能化”的階段性體現(xiàn)之一。
本文轉(zhuǎn)載自傳感器技術(shù)。
推薦閱讀:



